“ROV Applications- Commercial Offshore." Remotely Operated Vehicle Committee. Marine Technology Society. Web. 03 Sept. 2010.
"ROV Applications- Military." Remotely Operated Vehicle Committee. Marine Technology Society. Web. 03 Sept. 2010.






 |
| Testing Environment |
 |
| Competition Environment |
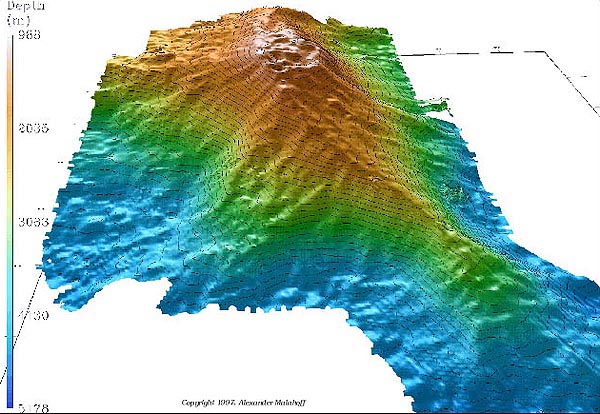
Problem/Situation The open ocean is an inhospitable and generally difficult to penetrate environment. For example, HUGO, the research station set up to monitor seismic activity of the seamount Loihi, has lost functionality. Its cable became flooded, cutting off power to the system and barring scientists from continuing to gather data on Loihi. Somehow, HUGO must be revived, or else the data must come from another means, but unfortunately, the deep-sea environment is too dangerous for a dive team. To simulate this problem, and provide students the opportunity to come up with a solution, the MATE's ROV competition requires certain tasks to be accomplished remotely in an underwater environment.
 People Involved As a group, my team will represent the engineers in the industry designing solutions to the problem. Each of us has been assigned a different focus, just as each member of an engineering team would work on a different component of the solution. Besides science, these engineering teams cater to commercial and government entities with an interest in unfeasible undersea operations. Commercially, for example, oil extraction companies are interested in exploiting the untapped reserves of hydrocarbons that lie beneath the ocean floor ("ROV Applications- Commercial"). Academically, scientists and researchers in the field of marine biology have taken a profound interest to deep-sea ecosystems, especially those located around hydrothermal vents; however, most of these ecosystems lie beneath the threshold of safe diving and are unreachable by the scientists ("ROV Applications- Academic/Scientific"). The military also has encountered similar problems. Mine countermeasures, underwater reconnaissance, and recovery of lost devices and weapons are all tasks that are beyond the capabilities of dive teams ("ROV Applications- Military”). While we do not have client-centered specifications, the competition specs should simulate the design process from the perspective of a professional engineer.     .jpg) Significance Competing in the MATE's ROV competition affords students the opportunity to learn and practice ROV design while gaining exposure to the methods of engineering. ROV design is a very relevant learning experience today. The versatility of an ROV makes it an attractive solution to commercial, academic, and government issues alike. All of these entities have vast reserves of capital to spend on solutions to their problems. In short, a solution to the similar problems faced by these entities, when well engineered and marketed, would be extremely lucrative. There are reasons aside from financial gains to help these entities, too. Helping oil companies search for oil would help curb the US dependence on foreign oil, as well as keep a steady supply at market, and, as a result, gas prices low for the American consumer. Aiding scientific research will lead to new breakthroughs. Providing a solution to the military is not only patriotic but a contribution to national security.      Mood of Design The mood that needs to be conveyed by the design is one of versatility, reliability, and durability. Each customer has a different problem and objective. Because of this, a versatile solution allows for a broader range of tasks that can be completed with a single product. Reliability is crucial because if the solution fails or breaks down during a mission, it will reflect badly on the producer and result in a damaged reputation, making future sales more difficult. Lastly, durability is important because quality, personalized solutions are generally expensive, and although the potential clients are wealthy, a product with a reputation of durability will assure them that they are making a safe investment. In terms of the competition, customer appeal is of less importance, but to engineer a quality solution, these characteristics must be taken into account.
Products With Similar Functions There are certain products with functions that may prove usable in a solution to the problems outlined above. Obviously, the solution needs to be remotely operated, a technology observable in remote controlled cars. During the competition, the ROV will have to take a temperature reading remotely, so a thermometer will have to be used. A robotic arm, such as those used by NASA, allows for an operator to make decisions based upon pressures from unforeseen and external forces and allows for a multitude of various tasks to be completed. Mobility is important, and the balance between propulsion and buoyancy that would need to be used for the solution could have its roots in submarines, as they are able to move freely up and down the water column. Lastly, a hydrophone will be needed to perform the task in which the ROV must identify the source of a noise.      |